
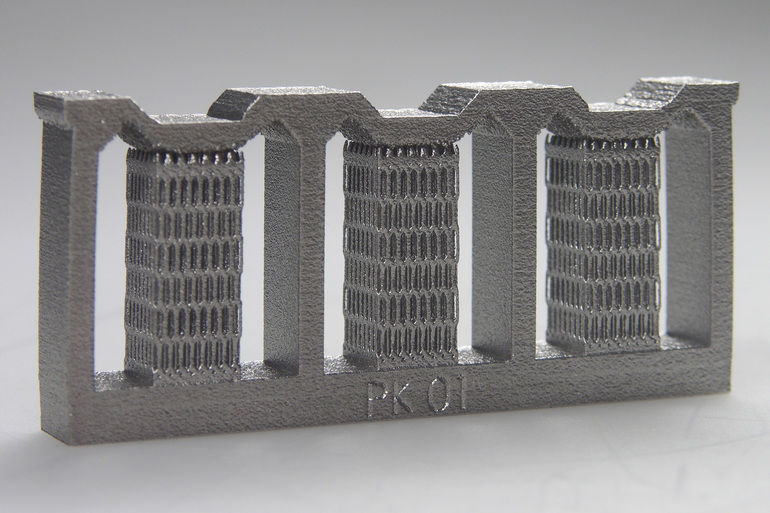

Die additive Fertigung erfreut sich zunehmender Beliebtheit. Die Branche verbucht aktuell Wachstumsraten mit bis zu 30 Prozent pro Jahr. Schicht für Schicht entstehen aus metallischen Pulvern Baukörper. Diese erhalten, um die geforderte Maß- und Formgenauigkeit zu erreichen, Stützen, die nach dem Produktionsvorgang bislang manuell vom Baukörper getrennt werden.
Doch was bei Unikaten und Prototypen machbar ist, lässt sich kaum auf die Serienfertigung übertragen. Vor allem dann nicht, wenn es sich um komplexe Baugruppen in großer Stückzahl handelt. Die werden immer häufiger von der Automobilindustrie sowie der Luft- und Raumfahrttechnik abgerufen.
Roboter mit hoher Bewegungsfreiheit
Bislang gibt es weltweit keine prozesssichere und wirtschaftliche Lösung, mit der man derartige Strukturen vollautomatisch entfernen kann. Deshalb lautet die Anforderung an Martin Mechanic, eine Anlage zu bauen, deren Roboter mit entsprechenden Werkzeugen und hoher Bewegungsfreiheit an den richtigen Stellen ansetzt.
Erschwerend kommt hinzu, dass oft jedes AM-Rohteil ein Unikat ist. Also muss die Technologie in der Lage sein, sich der individuellen Rohteilgeometrie anzupassen, die sich aufgrund freigesetzter Eigenspannungen sogar verändern kann.
Flexible Automatisierte Stützstruktur Entfernung
Das Förderprojekt läuft unter dem Arbeitstitel FASE, was für Flexible Automatisierte Stützstruktur Entfernung steht. Gemeinsam mit dem Team um Professor Wolfgang Hintze vom Institut für Produktionsmanagement und -technik der Technischen Universität Hamburg (IPMT) werden die mechanischen Grundlagen und passenden Technologien erarbeitet. Die Nagolder Ingenieure setzen sie dann in die Praxis um. Weitere Partner wie Rolf Lenk Werkzeug- und Maschinenbau oder Loll Feinmechanik liefern die Erprobungsteile.
„Für uns ist dieses Pilotprojekt nicht nur eine große Herausforderung“, sagt Claus Martin, geschäftsführender Gesellschafter von Martin Mechanic, „das Vertrauen in unsere Projekterfahrung erfüllt uns auch mit Stolz.“ Einer der Stolpersteine ist in den Augen von Dr. Bernhard Bock, der das Pilotprojekt für Martin Mechanic begleitet, die Frage der Technologie, die für das Trennen in Frage kommt. Außerdem handele es sich häufig um komplizierte Bauformen, bei denen die Trennstellen nicht immer genau definiert seien. „Deshalb brauchen wir nicht nur eine Schnittstelle zum CAD-System, sondern auch eine entsprechende Sensorik, die den genauen Verlauf der Nahtstelle zwischen Stützstruktur und Bauteil erfasst.“
Martin Mechanic Friedrich Martin GmbH & Co KG
www.martinmechanic.com
MartinMechanic Friedrich Martin GmbH & Co KG
Heinrich-Hertz-Strasse 2
72202 Nagold
Telefon +49 7452 8466-0
E-Mail: info@MartinMechanic.com
Technische Universität Hamburg
Institut für Produktionsmanagement und -technik
www.tuhh.de/ipmt
Institut für Produktionsmanagement und -technik IPMT
Denickestr. 17
21073 Hamburg
Telefon +49 40 428 78–32 33
E-Mail ipmt(at)tuhh.de






{kind=link}